机器之心报道
机器之心编辑部
OpenAI 投了一家做具身智能的机器人公司,ChatGPT 要有身体了?
前段时间,OpenAI 和微软联手扔下两枚重磅炸弹:被人千呼万唤的 GPT-4 和以迅雷不及掩耳之势发布的 Microsoft 365 Copilot。借助前者强大的图文理解、生成能力,后者把很多工作都自动化了,包括写文档,把 Word 转成 PPT,根据 Excel 数据生成图表……
一时之间,AI 模型似乎什么都可以干了,但有些需要身体的活儿暂时还干不了。于是,压力来到了机器人这边。
AI 大模型加机器人会产生什么化学反应?谷歌前不久的一项研究已经给出了初步答案:他们训练了一个参数量达 5620 亿的具身多模态语言模型 —— PaLM-E,然后用这个模型来驱动机器人自主地完成各项任务。在执行这些任务的过程中,机器人必须像人一样能看、能「思考」,把眼前的状况分析清楚,然后制定行动计划并执行。
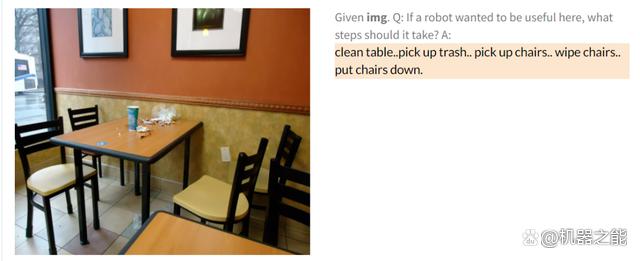
比如,你可以直接问机器人:「如果一个机器人想在这里(如下图)发挥作用,它应该采取哪些步骤?」PaLM-E 可以给出答案:首先清理桌子、清理垃圾,然后挪动椅子、擦椅子,最后把椅子放回原处。对于普通 AI 模型来说,能回答出这些就已经可以了。但区别在于,谷歌这个大模型是有身体的,因此可以把上面提到的工作都做完。这就给了大家更大的想象空间。

当然,在这个名为「具身智能」的领域,谷歌并不是唯一的玩家。国内外很多研究机构、初创公司都将其作为发力方向之一。其中,一家名为「1X」的机器人公司成功引起了 OpenAI 的注意。
1X 成立于 2014 年,原名 Halodi Robotics,其目标是创造具有实用价值,可以在现实世界中应用的机器人,以增加全球劳动力。
Halodi Robotics 发布的自家机器人 demo
在最近公布的 A2 轮融资中,这家公司总共融到了 2350 万美元。重要的是,这轮融资是由 OpenAI 创业基金领投的,老虎环球和一个由 Sandwater、Alliance Ventures 和 Skagerak Capital 等挪威投资者组成的财团也参与了投资。1X 计划用这笔资金来加大力度研发双足机器人模型 NEO,以及在挪威和北美量产其首款商用机器人 EVE。

官网展示的机器人模型 NEO

机器人 EVE
在 1X 的官网上,我们可以看到该公司对于两大机器人产品的路径规划:EVE 具备轻柔地移动、操纵物体和与世界互动的能力,离现实世界应用已经非常近了;NEO 的目标则是探索人工智能如何在类人身体中形成,也就是我们所说的具身 AI。这或许既是 OpenAI 选择投资 1X,也是前谷歌机器人高级研究科学家 Eric Jang 选择加入这家公司的原因。
Eric Jang 2022 年 3 月末从谷歌离职(待了 6 年),4 月 25 日宣布加入 1X(当时还叫 Halodi Robotics),担任 AI 副总裁一职。

在选择下家的过程中,Eric Jang 是非常谨慎的,最重要的决定因素是该公司是否拥有领先竞争对手数年的技术优势。在他看来,专攻类人机器人的 Halodi 已经满足这一条件。
「我个人(通过加入 Halodi)押注的护城河是『比其他任何公司都领先 5 年的人形机器人』。Halodi 已经有了,而特斯拉正在开发他们的同类产品。我在 Halodi 的主要工作最初是训练模型以解决移动操作中的特定客户问题,同时也为 AGI 制定路线图:如何从人形形式压缩大量具身的第一人称数据,从而产生通用智能、心智理论和自我意识。」Eric Jang 在博客中写道。
OpenAI 对 1X 的投资让这家公司备受瞩目,OpenAI 创业基金 Brad Lightcap 表示,他们相信 1X 可能对未来工作提供的方法及产生的影响。老虎环球的合伙人 Griffin Schroeder 也表达了对 1X 使命的热情:「我们相信 1X 的机器人正在彻底改变机器人领域,我们很高兴能与 OpenAI 一起投资,以支持他们的持续增长」。
不过,将 AI 与机器人融合可能并没有想象中那么容易。Eric Jang 在刚加入新公司的时候也提到,「近年来,具身 AI 和机器人研究已经失去了一些光彩,因为大型语言模型现在可以解释笑话,而机器人仍然在以不可接受的成功率进行拾取和放置。」但他还是选择了「押注」。因为他认为,「仅在比特世界对模型进行训练是不够的」。
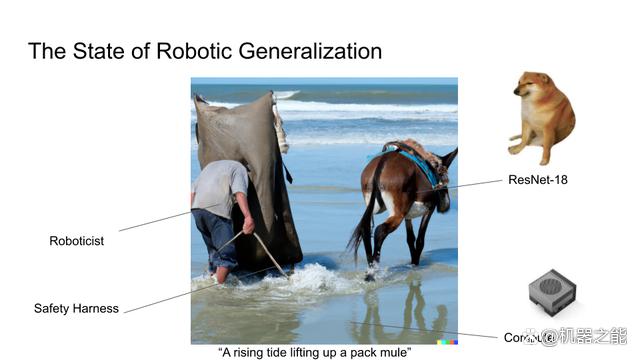
Eric Jang 在博客中展示的机器人领域泛化研究的现状。他提到,「目前很多机器人研究人员仍在进行的是小模型训练,并且还没有用过 Vision Transformer!」
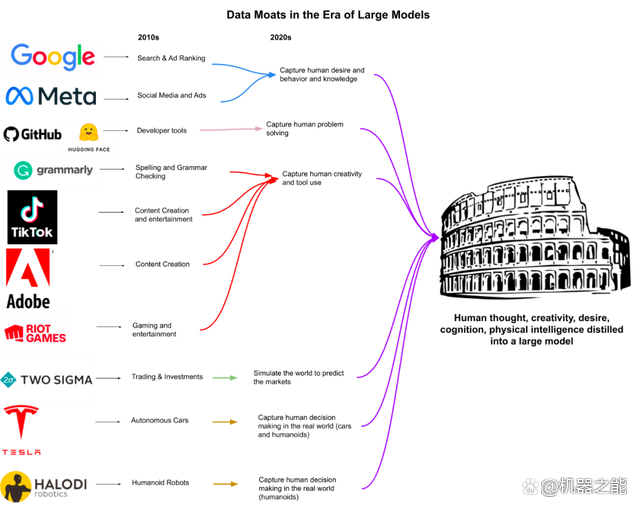
在加入 Halodi 的这一年里,Eric Jang 一直密切注视着 AI 基础模型方向的进展,试图缩小机器人与 AI 生成模型之间的差距。在一篇名为《我们如何让机器人更像生成模型》的博客中,Eric Jang 从三个不同的维度比较了生成模型和机器人技术,思考如何将二者更好地联系到一起。其成果或将体现在今年夏天即将面世的 NEO 机器人中。